Developer Reference for Intel® oneAPI Math Kernel Library for C
A newer version of this document is available. Customers should click here to go to the newest version.
p?labrd
Reduces the first nb rows and columns of a general rectangular matrix A to real bidiagonal form by an orthogonal/unitary transformation, and returns auxiliary matrices that are needed to apply the transformation to the unreduced part of A.
void pslabrd (MKL_INT *m , MKL_INT *n , MKL_INT *nb , float *a , MKL_INT *ia , MKL_INT *ja , MKL_INT *desca , float *d , float *e , float *tauq , float *taup , float *x , MKL_INT *ix , MKL_INT *jx , MKL_INT *descx , float *y , MKL_INT *iy , MKL_INT *jy , MKL_INT *descy , float *work );
void pdlabrd (MKL_INT *m , MKL_INT *n , MKL_INT *nb , double *a , MKL_INT *ia , MKL_INT *ja , MKL_INT *desca , double *d , double *e , double *tauq , double *taup , double *x , MKL_INT *ix , MKL_INT *jx , MKL_INT *descx , double *y , MKL_INT *iy , MKL_INT *jy , MKL_INT *descy , double *work );
void pclabrd (MKL_INT *m , MKL_INT *n , MKL_INT *nb , MKL_Complex8 *a , MKL_INT *ia , MKL_INT *ja , MKL_INT *desca , float *d , float *e , MKL_Complex8 *tauq , MKL_Complex8 *taup , MKL_Complex8 *x , MKL_INT *ix , MKL_INT *jx , MKL_INT *descx , MKL_Complex8 *y , MKL_INT *iy , MKL_INT *jy , MKL_INT *descy , MKL_Complex8 *work );
void pzlabrd (MKL_INT *m , MKL_INT *n , MKL_INT *nb , MKL_Complex16 *a , MKL_INT *ia , MKL_INT *ja , MKL_INT *desca , double *d , double *e , MKL_Complex16 *tauq , MKL_Complex16 *taup , MKL_Complex16 *x , MKL_INT *ix , MKL_INT *jx , MKL_INT *descx , MKL_Complex16 *y , MKL_INT *iy , MKL_INT *jy , MKL_INT *descy , MKL_Complex16 *work );
- mkl_scalapack.h
The p?labrdfunction reduces the first nb rows and columns of a real/complex general m-by-n distributed matrix sub(A) = A(ia:ia+m-1, ja:ja+n-1) to upper or lower bidiagonal form by an orthogonal/unitary transformation Q'* A * P, and returns the matrices X and Y necessary to apply the transformation to the unreduced part of sub(A).
If m ≥n, sub(A) is reduced to upper bidiagonal form; if m < n, sub(A) is reduced to lower bidiagonal form.
This is an auxiliary function called by p?gebrd.
- m
-
(global) The number of rows in the distributed matrix sub(A). (m≥ 0).
- n
-
(global) The number of columns in the distributed matrix sub(A). (n ≥ 0).
- nb
-
(global)
The number of leading rows and columns of sub(A) to be reduced.
- a
-
(local).
Pointer into the local memory to an array of size lld_a * LOCc(ja+n-1).
On entry, this array contains the local pieces of the general distributed matrix sub(A).
- ia, ja
-
(global) The row and column indices in the global matrix A indicating the first row and the first column of the matrix sub(A), respectively.
- desca
-
(global and local) array of size dlen_. The array descriptor for the distributed matrix A.
- ix, jx
-
(global) The row and column indices in the global matrix X indicating the first row and the first column of the matrix sub(X), respectively.
- descx
-
(global and local) array of size dlen_. The array descriptor for the distributed matrix X.
- iy, jy
-
(global) The row and column indices in the global matrix Y indicating the first row and the first column of the matrix sub(Y), respectively.
- descy
-
(global and local) array of size dlen_. The array descriptor for the distributed matrix Y.
- work
-
(local).
Workspace array of sizelwork.
lwork ≥ nb_a + nq,
with nq = numroc(n+mod(ia-1, nb_y), nb_y, mycol, iacol, npcol)
iacol = indxg2p (ja, nb_a, mycol, csrc_a, npcol)
indxg2p and numroc are ScaLAPACK tool functions; myrow, mycol, nprow, and npcol can be determined by calling the function blacs_gridinfo.
- a
-
(local)
On exit, the first nb rows and columns of the matrix are overwritten; the rest of the distributed matrix sub(A) is unchanged.
If m ≥ n, elements on and below the diagonal in the first nb columns, with the array tauq, represent the orthogonal/unitary matrix Q as a product of elementary reflectors; and elements above the diagonal in the first nb rows, with the array taup, represent the orthogonal/unitary matrix P as a product of elementary reflectors.
If m < n, elements below the diagonal in the first nb columns, with the array tauq, represent the orthogonal/unitary matrix Q as a product of elementary reflectors, and elements on and above the diagonal in the first nb rows, with the array taup, represent the orthogonal/unitary matrix P as a product of elementary reflectors. See Application Notes below.
- d
-
(local).
Array of size LOCr(ia+min(m,n)-1) if m ≥ n; LOCc(ja+min(m,n)-1) otherwise. The distributed diagonal elements of the bidiagonal distributed matrix B:
d[i] = A(ia+i, ja+i), i= 0, 1, ..., size (d)-1
d is tied to the distributed matrix A.
- e
-
(local).
Array of size LOCr(ia+min(m,n)-1) if m ≥ n; LOCc(ja+min(m,n)-2) otherwise. The distributed off-diagonal elements of the bidiagonal distributed matrix B:
if m ≥ n, e[i] = A(ia+i, ja+i+1) for i = 0, 1, ..., n-2;
if m<n, e[i] = A(ia+i+1, ja+i) for i = 0, 1, ..., m-2.
e is tied to the distributed matrix A.
- tauq, taup
-
(local).
Array size LOCc(ja+min(m, n)-1) for tauq, size LOCr(ia+min(m, n)-1) for taup. The scalar factors of the elementary reflectors which represent the orthogonal/unitary matrix Q for tauq, P for taup. tauq and taup are tied to the distributed matrix A. See Application Notes below.
- x
-
(local)
Pointer into the local memory to an array of size lld_x* nb. On exit, the local pieces of the distributed m-by-nb matrix X(ix:ix+m-1, jx:jx+nb-1) required to update the unreduced part of sub(A).
- y
-
(local).
Pointer into the local memory to an array of size lld_y* nb. On exit, the local pieces of the distributed n-by-nb matrix Y(iy:iy+n-1, jy:jy+nb-1) required to update the unreduced part of sub(A).
The matrices Q and P are represented as products of elementary reflectors:
Q = H(1)*H(2)*...*H(nb), and P = G(1)*G(2)*...*G(nb)
Each H(i) and G(i) has the form:
H(i) = I - tauq*v*v' , and G(i) = I - taup*u*u',
where tauq and taup are real/complex scalars, and v and u are real/complex vectors.
If m ≥ n, v(1: i-1 ) = 0, v(i) = 1, and v(i:m) is stored on exit in
A(ia+i-1:ia+m-1, ja+i-1); u(1:i) = 0, u(i+1 ) = 1, and u(i+1:n) is stored on exit in A(ia+i-1, ja+i:ja+n-1); tauq is stored in tauq[ja+i-2] and taup in taup[ia+i-2].
If m < n, v(1: i) = 0, v(i+1 ) = 1, and v(i+1:m) is stored on exit in
A(ia+i+1:ia+m-1, ja+i-1); u(1:i-1 ) = 0, u(i) = 1, and u(i:n) is stored on exit in A(ia+i-1, ja+i:ja+n-1); tauq is stored in tauq[ja+i-2] and taup in taup[ia+i-2]. The elements of the vectors v and u together form the m-by-nb matrix V and the nb-by-n matrix U' which are necessary, with X and Y, to apply the transformation to the unreduced part of the matrix, using a block update of the form: sub(A):= sub(A) - V*Y' - X*U'. The contents of sub(A) on exit are illustrated by the following examples with nb = 2:
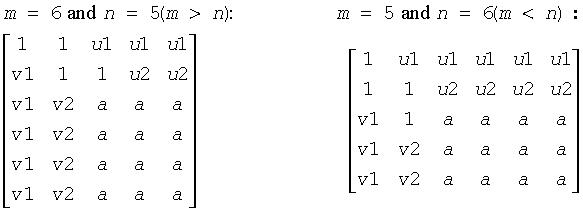
where a denotes an element of the original matrix which is unchanged, vi denotes an element of the vector defining H(i), and ui an element of the vector defining G(i).