MIPI D-PHY IP User Guide: Agilex™ 3 and Agilex™ 5 FPGAs
ID
817561
Date
6/30/2025
Public
1. About the MIPI D-PHY IP
2. Configuring and Generating the MIPI D-PHY IP
3. MIPI D-PHY Interface Design Guidelines
4. Simulating the MIPI D-PHY IP
5. Validating the MIPI D-PHY IP
6. Debugging the MIPI-PHY IP
7. MIPI D-PHY Architecture
8. Interface Signals and Register Maps
9. Verification Test Plan
10. Document Revision History for the MIPI D-PHY IP User Guide
6.1. Creating a Simplified Design that Demonstrates the Same Problem
6.2. Evaluating FPGA Timing Problems
6.3. Determining if the Problem Exists in Previous Quartus Prime Versions
6.4. Determining if the Problem Exists in the Current Version of Software
6.5. Verifying the MIPI D-PHY IP Using the Signal Tap Logic Analyzer
6.6. Varying the Voltage
6.7. Operating at Lower Speed
6.8. Trying a Different PCB
8.2.1.1. IP_ID
8.2.1.2. IP_CAP
8.2.1.3. D0_CAP
8.2.1.4. DN_CAP
8.2.1.5. RX_CAP
8.2.1.6. TX_CAP
8.2.1.7. TX_PREAMBLE_LEN
8.2.1.8. D-PHY_CSR
8.2.1.9. TX_CLK_LANE_PS
8.2.1.10. RX_DLANE_ERR
8.2.1.11. SKEW_CAL_LEN_B0
8.2.1.12. SKEW_CAL_LEN_B1
8.2.1.13. SKEW_CAL_LEN_B2
8.2.1.14. SKEW_CAL_LEN_B3
8.2.1.15. ALT_CAL_LEN_B0
8.2.1.16. ALT_CAL_LEN_B1
8.2.1.17. ALT_CAL_LEN_B2
8.2.1.18. ALT_CAL_LEN_B3
8.2.1.19. CLK_CSR
8.2.1.20. CLK_STATUS
8.2.1.21. DLANE_CSR_0
8.2.1.22. DLANE_STATUS_0
8.2.1.23. RX_DLANE_DESKEW_DELAY_0
8.2.1.24. RX_DLANE_ERR_0
8.2.1.25. DLANE_CSR_1
8.2.1.26. DLANE_STATUS_1
8.2.1.27. RX_DLANE_DESKEW_DELAY_1
8.2.1.28. RX_DLANE_ERR_1
8.2.1.29. DLANE_CSR_2
8.2.1.30. DLANE_STATUS_2
8.2.1.31. RX_DLANE_DESKEW_DELAY_2
8.2.1.32. RX_DLANE_ERR_2
8.2.1.33. DLANE_CSR_3
8.2.1.34. DLANE_STATUS_3
8.2.1.35. RX_DLANE_DESKEW_DELAY_3
8.2.1.36. RX_DLANE_ERR_3
8.2.1.37. DLANE_CSR_4
8.2.1.38. DLANE_STATUS_4
8.2.1.39. RX_DLANE_DESKEW_DELAY_4
8.2.1.40. RX_DLANE_ERR_4
8.2.1.41. DLANE_CSR_5
8.2.1.42. DLANE_STATUS_5
8.2.1.43. RX_DLANE_DESKEW_DELAY_5
8.2.1.44. RX_DLANE_ERR_5
8.2.1.45. DLANE_CSR_6
8.2.1.46. DLANE_STATUS_6
8.2.1.47. RX_DLANE_DESKEW_DELAY_6
8.2.1.48. RX_DLANE_ERR_6
8.2.1.49. DLANE_CSR_7
8.2.1.50. DLANE_STATUS_7
8.2.1.51. RX_DLANE_DESKEW_DELAY_7
8.2.1.52. RX_DLANE_ERR_7
8.2.1.53. TX_LPX
8.2.1.54. TX_HS_EXIT
8.2.1.55. TX_LP_EXIT
8.2.1.56. TX_CLK_PREPARE
8.2.1.57. TX_CLK_ZERO
8.2.1.58. TX_CLK_POST
8.2.1.59. TX_CLK_PRE
8.2.1.60. TX_HS_PREPARE
8.2.1.61. TX_HS_ZERO
8.2.1.62. TX_HS_TRAIL
8.2.1.63. TX_INIT
8.2.1.64. TX_WAKE
8.2.1.65. RX_CLK_LOSS_DETECT
8.2.1.66. RX_CLK_SETTLE
8.2.1.67. RX_HS_SETTLE
8.2.1.68. RX_INIT
8.2.1.69. RX_CLK_POST
8.2.1.70. RX_CAL_REG_CTRL
8.2.1.71. RX_CAL_STATUS_D-PHY
8.2.1.72. RX_CAL_SKEW_W_START_MUX
8.2.1.73. RX_CAL_SKEW_W_END_MUX
8.2.1.74. RX_CAL_ALT_W_START_MUX
8.2.1.75. RX__CAL_ALT_W_END_MUX
8.2.1.76. RX_DESKEW_DELAY_MUX
8.2.1.77. RX_CAL_STATUS_LANE_MUX
8.2.1.78. PRBS_INIT_0
8.2.1.79. PRBS_INIT_1
8.2.1.80. PRBS_INIT_2
8.2.1.81. PRBS_INIT_3
8.2.1.82. PRBS_INIT_4
8.2.1.83. PRBS_INIT_5
8.2.1.84. PRBS_INIT_6
8.2.1.85. TX_TM_CONTROL
8.2.1.86. TX_MNL_IO_0
8.2.1.87. TX_MNL_D_LP_EN
8.2.1.88. RX_TM_CONTROL
8.2.2.1. TG_TOP_CTRL_0
8.2.2.2. TG_TOP_CTRL_1
8.2.2.3. TG_TOP_DONE
8.2.2.4. TG_TOP_FAIL
8.2.2.5. TG_TOP_TEST_EN
8.2.2.6. TG_TOP_TEST_LINK
8.2.2.7. TARGET_TEST_CNT
8.2.2.8. TCHK_CONTROL
8.2.2.9. TCHK_LINK_STATUS
8.2.2.10. HS_DONE_LANES
8.2.2.11. TCHK_LINK_ERR_STATUS
8.2.2.12. LANE_ERROR_SOT_LANES
8.2.2.13. CAL_ERROR_LANES
8.2.2.14. HS_ERR_LANES
8.2.2.15. HS_TEST_CNT
8.2.2.16. LPDT_TEST_CNT
8.2.2.17. TRIGGER_TEST_CNT
8.2.2.18. ULPS_TEST_CNT
8.2.2.19. TG_RX_OVRD_DATA_PAT
8.2.2.20. TG_RX_BIT_ERROR_CNT
8.2.2.21. TG_RX_HS_TXFER_CNT
8.2.2.22. TG_LINK_CONTROL
8.2.2.23. TG_INIT_CNT
8.2.2.24. TG_HS_LEN
8.2.2.25. TG_LP_LEN
8.2.2.26. TG_SKEW_CAL
8.2.2.27. TG_ALT_CAL
8.2.2.28. TG_PER_SKEW_CAL_LEN
8.2.2.29. TG_TEST_CNT
8.2.2.30. TG_OVRD_DATA_PAT
8.2.2.31. TG_TX_HS_TXFER_CNT
4.1. Simulating the MIPI D-PHY IP Design Example with External Loopback Enabled
The MIPI D-PHY IP allows you to generate the design example with external loopback that includes the MIPI D-PHY IP and traffic generator. Run this design example to validate your MIPI IP operation.
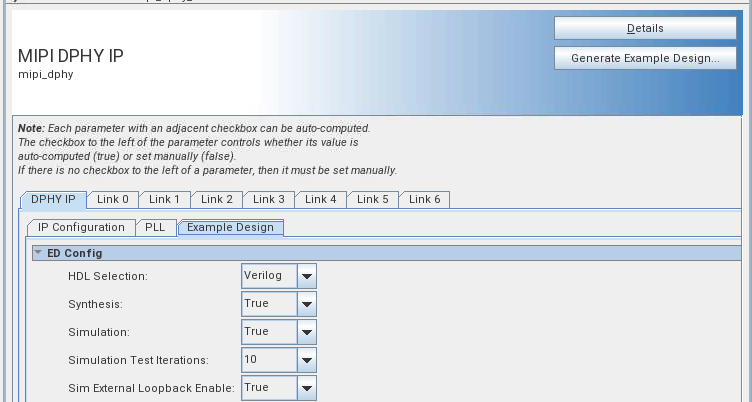
- On the Example Design tab, set the Simulation parameter to True.
- On the Example Design tab under the D-PHY IP tab, ensure that the Sim External Loopback Enable parameter is set to true.
- For both the RX and TX link, ensure thatthat you enable the calibration settings according to the requirement of the operating data rate. .
- Ensure that both the RX and TX links have the same bit rate and number of data lanes.
- Configure the parameters as appropriate for your needs and click File > Save to save the current settings into the IP variation file (<user instance name>.ip)
- Click Generate Example Design in the upper-right corner of the window.
Figure 14. Generate Example Design for Simulation
- Specify a directory for the MIPI D-PHY design example and click OK.
After a successful generation of the MIPI D-PHY design example, you see multiple file sets for various supported simulators, in the sim/ed_sim directory.
- Click File > Exit to exit the IP Parameter Editor.
When you see the prompt Recent changes have not been generated. Generate now? Click No to continue.