Visible to Intel only — GUID: GUID-03BCD013-B762-4D6E-B863-1B86E6BEC676
Introduction
Install and Launch Intel® Advisor
Set Up Project
Analyze Vectorization Perspective
Analyze CPU Roofline
Model Threading Designs
Model Offloading to a GPU
Analyze GPU Roofline
Design and Analyze Flow Graphs
Minimize Analysis Overhead
Analyze MPI Applications
Manage Results
Command Line Interface
Troubleshooting
Reference
Appendix
Notices and Disclaimers
Annotation Report, Clear Description of Storage Row
Annotation Report, Disable Observations in Region Row
Annotation Report, Pause Collection Row
Annotation Report, Inductive Expression Row
Annotation Report, Lock Row
Annotation Report, Observe Uses Row
Annotation Report, Reduction Row
Annotation Report, Re-enable Observations at End of Region Row
Annotation Report, Resume Collection Row
Annotation Report, Site Row
Annotation Report, Task Row
Annotation Report, User Memory Allocator Use Row
Annotation Report, User Memory Deallocator Use Row
Intel® oneAPI Threading Building Blocks (oneTBB) Mutexes
Intel® oneAPI Threading Building Blocks (oneTBB) Simple Mutex - Example
Test the Intel® oneAPI Threading Building Blocks (oneTBB) Synchronization Code
Parallelize Functions - Intel® oneAPI Threading Building Blocks (oneTBB) Tasks
Parallelize Data - Intel® oneAPI Threading Building Blocks (oneTBB) Counted Loops
Parallelize Data - Intel® oneAPI Threading Building Blocks (oneTBB) Loops with Complex Iteration Control
Add OpenMP Code to Synchronize the Shared Resources
OpenMP Critical Sections
Basic OpenMP Atomic Operations
Advanced OpenMP Atomic Operations
OpenMP Reduction Operations
OpenMP Locks
Test the OpenMP Synchronization Code
Parallelize Functions - OpenMP Tasks
Parallelize Data - OpenMP Counted Loops
Parallelize Data - OpenMP Loops with Complex Iteration Control
Where to Find the Flow Graph Analyzer
Launching the Flow Graph Analyzer
Flow Graph Analyzer GUI Overview
Flow Graph Analyzer Workflows
Designer Workflow
Generating C++ Stubs
Preferences
Scalability Analysis
Collecting Traces from Applications
Nested Parallelism in Flow Graph Analyzer
Analyzer Workflow
Experimental Support for OpenMP* Applications
Sample Trace Files
Additional Resources
accuracy
append
app-working-dir
assume-dependencies
assume-hide-taxes
assume-ndim-dependency
assume-single-data-transfer
auto-finalize
batching
benchmarks-sync
bottom-up
cache-binaries
cache-binaries-mode
cache-config
cache-simulation
cache-sources
cachesim
cachesim-associativity
cachesim-cacheline-size
cachesim-mode
cachesim-sampling-factor
cachesim-sets
check-profitability
clear
config
count-logical-instructions
count-memory-instructions
count-memory-objects-accesses
count-mov-instructions
count-send-latency
cpu-scale-factor
csv-delimiter
custom-config
data-limit
data-reuse-analysis
data-transfer
data-transfer-histogram
data-transfer-page-size
data-type
delete-tripcounts
disable-fp64-math-optimization
display-callstack
dry-run
duration
dynamic
enable-cache-simulation
enable-data-transfer-analysis
enable-task-chunking
enforce-baseline-decomposition
enforce-fallback
enforce-offloads
estimate-max-speedup
evaluate-min-speedup
exclude-files
executable-of-interest
exp-dir
filter
filter-by-scope
filter-reductions
flop
force-32bit-arithmetics
force-64bit-arithmetics
format
gpu
gpu-carm
gpu-sampling-interval
hide-data-transfer-tax
ignore
ignore-app-mismatch
ignore-checksums
instance-of-interest
integrated
interval
limit
loop-call-count-limit
loop-filter-threshold
loops
mark-up
mark-up-list
memory-level
memory-operation-type
mix
mkl-user-mode
model-baseline-gpu
model-children
model-extended-math
model-system-calls
module-filter
module-filter-mode
mpi-rank
mrte-mode
ndim-depth-limit
option-file
overlap-taxes
pack
profile-gpu
profile-intel-perf-libs
profile-jit
profile-python
profile-stripped-binaries
project-dir
quiet
recalculate-time
record-mem-allocations
record-stack-frame
reduce-lock-contention
reduce-lock-overhead
reduce-site-overhead
reduce-task-overhead
refinalize-survey
remove
report-output
report-template
result-dir
resume-after
return-app-exitcode
search-dir
search-n-dim
select
set-dependency
set-parallel
set-parameter
show-all-columns
show-all-rows
show-functions
show-loops
show-not-executed
show-report
small-node-filter
sort-asc
sort-desc
spill-analysis
stack-access-granularity
stack-stitching
stack-unwind-limit
stacks
stackwalk-mode
start-paused
static-instruction-mix
strategy
support-multi-isa-binaries
target-device
target-gpu
target-pid
target-process
target-system
threading-model
threads
top-down
trace-mode
trace-mpi
track-memory-objects
track-stack-accesses
track-stack-variables
trip-counts
verbose
with-stack
Error Message: Application Sets Its Own Handler for Signal
Error Message: Cannot Collect GPU Hardware Metrics for the Selected GPU Adapter
Error Message: Memory Model Cache Hierarchy Incompatible
Error Message: No Annotations Found
Error Message: No Data Is Collected
Error Message: Stack Size Is Too Small
Error Message: Undefined Linker References to dlopen or dlsym
Problem: Broken Call Tree
Problem: Code Region is not Marked Up
Problem: Debug Information Not Available
Problem: No Data
Problem: Source Not Available
Problem: Stack in the Top-Down Tree Window Is Incorrect
Problem: Survey Tool does not Display Survey Report
Problem: Unexpected C/C++ Compilation Errors After Adding Annotations
Problem: Unexpected Unmatched Annotations in the Dependencies Report
Warning: Analysis of Debug Build
Warning: Analysis of Release Build
Dangling Lock
Data Communication
Data Communication, Child Task
Inconsistent Lock Use
Lock Hierarchy Violation
Memory Reuse
Memory Reuse, Child Task
Memory Watch
Missing End Site
Missing End Task
Missing Start Site
Missing Start Task
No Tasks in Parallel Site
One Task Instance in Parallel Site
Orphaned Task
Parallel Site Information
Thread Information
Unhandled Application Exception
Dialog Box: Corresponding Command Line
Dialog Box: Create a Project
Dialog Box: Create a Result Snapshot
Dialog Box: Options - Assembly
Editor Tab
Dialog Box: Options - General
Dialog Box: Options - Result Location
Dialog Box: Project Properties - Analysis Target
Dialog Box: Project Properties - Binary/Symbol Search
Dialog Box: Project Properties - Source Search
Pane: Advanced View
Pane: Analysis Workflow
Pane: Roofline Chart
Pane: GPU Roofline Chart
Project Navigator Pane
Toolbar: Intel Advisor
Annotation Report
Window: Dependencies Source
Window: GPU Roofline Regions
Window: GPU Roofline Insights Summary
Window: Memory Access Patterns Source
Window: Offload Modeling Summary
Window: Offload Modeling Report - Accelerated Regions
Window: Perspective Selector
Window: Refinement Reports
Window: Suitability Report
Window: Suitability Source
Window: Survey Report
Window: Survey Source
Window: Threading Summary
Window: Vectorization Summary
Visible to Intel only — GUID: GUID-03BCD013-B762-4D6E-B863-1B86E6BEC676
Design and Optimization Methodology
Intel® Advisor helps you to design and optimize high-performing Fortran, C, C++, SYCL, OpenMP*, and OpenCL™ code to realize full performance potential on modern computer architecture. You can measure your application performance, collect required data, and look at your code from different perspectives depending on your goal to dig deeper and get hints for optimization.
Visualize Performance Bottlenecks with Roofline Chart
When optimizing your C, C++, SYCL, or Fortran application, it is useful to know application's current and potential performance in relation to hardware-imposed limitations like memory bandwidth and compute capacity of a target platform that it runs on - a CPU or a GPU.
Roofline model of the Intel Advisor visualizes actual performance against hardware-imposed performance ceilings and helps you determine the main limiting factor (memory bandwidth or compute capacity) to provide an ideal road map of potential optimization steps. This analysis highlights loops that have the most headroom for improvement, which allows you to focus on areas that deliver the biggest performance payoff.
To generate a Roofline report, the Intel Advisor:
- Collects loop/function (for CPU) or OpenCL™ kernels (for GPU) timings and memory data.
- Measures the hardware limitations and collects floating-point and integer operations data.
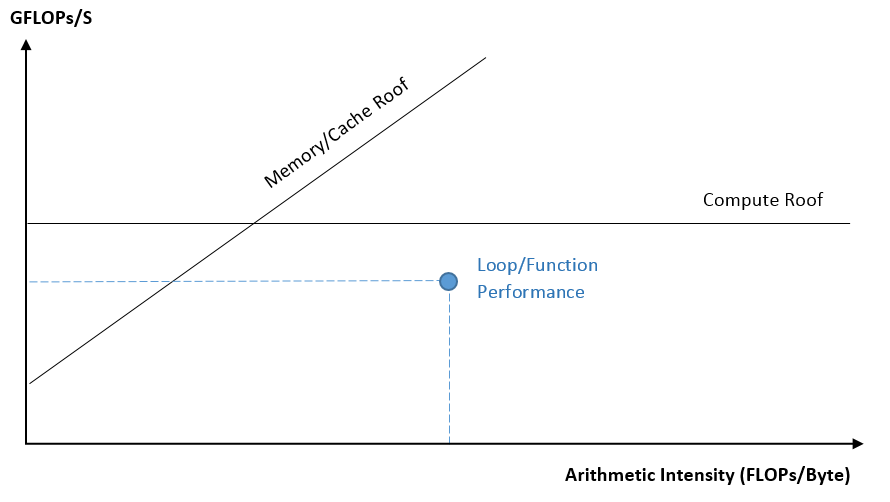
The Roofline chart plots an application achieved performance and arithmetic intensity against the hardware maximum achievable performance:
- Arithmetic intensity (x axis) - measured in number of floating-point operations (FLOPs) and/or integer operations (INTOPs) per byte, based on the loop/function algorithm, transferred between CPU/VPU/GPU and memory.
- Performance (y axis) - measured in billions of floating-point operations per second (GFLOPS) and/or billions of integer operations per second (GINTOPS).
With the data collected, the Intel Advisor plots the Roofline chart:
- Execution time of each loop/function/kernel is reflected in the size and color of each dot. The dots on the chart correspond to OpenCL kernels for GPU Roofline, while for the CPU Roofline, they correspond to individual loops/functions.
- Memory bandwidth limitations are plotted as diagonal lines.
- Compute capacity limitations are plotted as horizontal lines.
For details on how to get the Roofline report and read the results, see CPU / Memory Roofline Insights Perspective or GPU Roofline Insights Perspective.
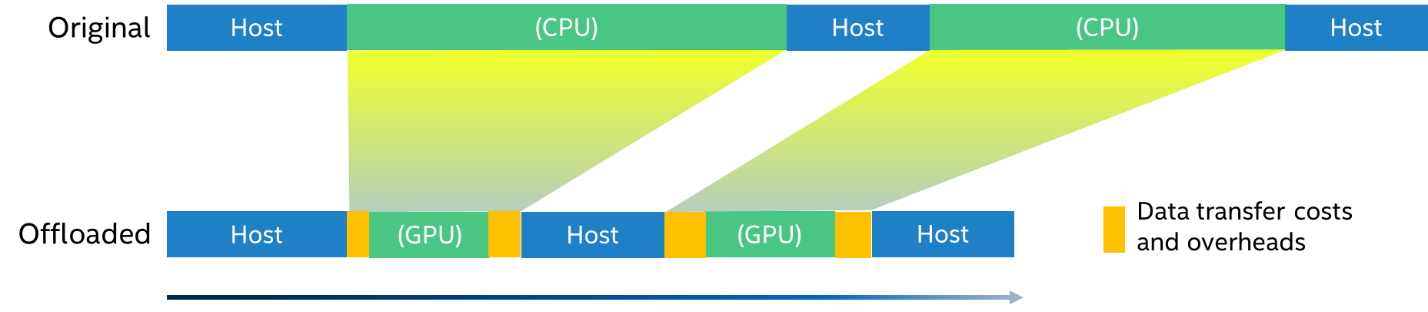
Model Offloading to Accelerator
When designing your application to offload to an accelerator, you might first want to:
Estimate the offload benefit and overhead for each loop/function in your original C++ or Fortran code to make better decisions on which parts of code to offload
Check performance gain for a SYCL , OpenCL™, or OpenMP* target application if you offload it to a different accelerator
Offload Modeling perspective of the Intel® Advisor can identify high-impact portions of a code that are profitable to offload to a target platform (for example, to a GPU) as well as the code regions that are not advantageous to offload. It can also predict the code performance if run on the target platform and lets you experiment with accelerator configuration parameters.
Offload Modeling takes measured baseline metrics and application characteristics as an input and applies an analytical model to estimate execution time and characteristics on a target platform.
Offload Modeling is based on three models:
- Compute throughput model counts arithmetic operations in a region on a baseline platform and estimates the execution time on a target platform required to achieve the same mix of arithmetic operations, considering it as bound by compute engines only.
- Memory sub-system throughput model traces memory accesses inside a region on a baseline platform and estimates the execution time on a target platform needed to transfer the same amount of memory. Memory traffic is measured using a cache simulator that reflects the target platform's memory configuration.
- Offload data transfer analysis measures memory accesses that are read from or written to a region and will need to be sent over a PCIe* if the region is offloaded to a target platform.
For details on how to run the Offload Modeling perspective and read the reports, see Offload Modeling Perspective.
Check Vectorization Efficiency
Modern Intel® processors have extensions that support SIMD (single instruction, multiple data) parallelism with Intel® Streaming SIMD Extensions (Intel® SSE), Intel® Advanced Vector Extensions 2 (Intel® AVX2), Intel® Advanced Vector Extensions 512 (Intel® AVX-512) . To take advantage of SIMD instructions with the expanded vector width and achieve higher performance, applications need to be vectorized.
You can rely on your desired compiler - Intel® C++ Compiler Classic, Intel® Fortran Compiler Classic, Intel® oneAPI DPC++/C++ Compiler, GNU Compiler Collection (GCC)* - to auto-vectorize some loops, but serial constraints of programming languages limit the compiler's ability to vectorize some loops. The need arose for explicit vector programming methods to extend vectorization capability for supporting reductions, vectorizing:
- Outer loops
- Loops with user-defined functions
- Loops that the compiler assumes to have data dependencies
To improve the performance of CPU-bound applications on modern processors with vector processing units, you might use explicit vector programming apply structural changes for thread-level parallelism and SIMD-level parallelism.
Use the Vectorization and Code Insights perspective of the Intel Advisor to analyze your application run time behavior and identify application parts that will benefit most from vectorization. Vectorization and Code Insights perspective helps you to achieve the best performance using vectorization and identify:
- Where vectorization, or parallelization with threads, will pay off the most
- If vectorized loops are providing benefit, and if not, why not
- Un-vectorized loops and why they are not vectorized
- Performance problems in general
For details on how to run the perspective and read the reports, see Vectorization and Code Insights Perspective.
Prototype Threading Designs
The best performance improvements from adding parallel execution (parallelism) to a program occur when many cores are busy most of the time doing useful work. Achieving this requires a lot of analysis, knowledge, and testing.
Because your serial program was not designed to allow parallel execution, as you convert parts of it to use parallel execution, you may encounter unexpected errors that occur only during parallel execution. Instead of wasting effort on portions of the program that use almost no CPU time, you should focus on the hotspots, and the functions between the main entry point and each hotspot.
If you add parallel execution to a program without proper preparation, unpredictable crashes, program hangs, and wrong answers can result from incorrect parallel task interactions. For example, you may need to add synchronization to avoid incorrect parallel task interactions, but this must be done carefully because locking overhead and serial synchronization can reduce the benefits of the parallel execution.
Threading perspective of the Intel Advisor helps you quickly prototype multiple threading options, project scaling on larger systems, optimize faster, and implement with confidence.
- Identify issues and fix them before implementing parallelism
- Add threading to C, C++, and Fortran code
- Prototype the performance impact of different threaded designs and project scaling on systems with larger core counts without disrupting development or implementation
- Find and eliminate data-sharing issues during design (when they're less expensive to fix)
The high-level parallel frameworks available for each programming language include:
Language |
Available High-Level Parallel Frameworks |
|---|---|
C |
OpenMP |
C++ |
Intel® oneAPI Threading Building Blocks (oneTBB) OpenMP |
Fortran |
OpenMP |
NOTE:
C# and .NET support is deprecated starting Intel® Advisor 2021.1.
For details on how to run the perspective and read the reports, see Threading Perspective.
Using Amdahl's Law and Measuring the Program
There are two rules of optimization that apply to parallel programming:
Focus on the part of the program that uses the most time.
Do not guess, measure.
Amdahl's Law
In the context of parallel programming, Gene Amdahl formalized a rule called Amdahl's Law, which states that the speed-up that is possible from parallelizing one part of a program is limited by the portion of the program that still runs serially.
The consequence may be surprising: parallelizing the part of your program where it spends 80% of its time cannot speed it up by more than a factor of five, no matter how many cores you run it on.
Therefore, to get maximum benefit from parallelizing your program, you could add parallelism to all parts of your program as suggested by Amdahl's Law. However, it is more practical to find where it spends most of its time and focus on areas that can provide the most benefit.
Do Not Guess - Measure
This leads to another rule of optimization: Do Not guess - Measure. Programmers' intuitions about where their programs are spending time are notoriously inaccurate. Intel® Advisor includes a Survey tool you can use to profile your running program and measure where it spends it time.
After you add Intel® Advisor annotations to your program to mark the proposed parallel code regions, run the Suitability tool to predict the approximate maximum performance gain for the program and the annotated sites. These estimated performance gain values are based on a model of parallel execution that reflects the impact of Amdahl's law.
Parent topic: Introduction