Intel® High Level Synthesis Compiler Standard Edition: Reference Manual
4.9. Reset Behavior
For your HLS component, the reset assertion can be asynchronous but the reset deassertion must be synchronous.
reg [2:0] sync_resetn;
always @(posedge clock or negedge resetn) begin
if (!resetn) begin
sync_resetn <= 3'b0;
end else begin
sync_resetn <= {sync_resetn[1:0], 1'b1};
end
end
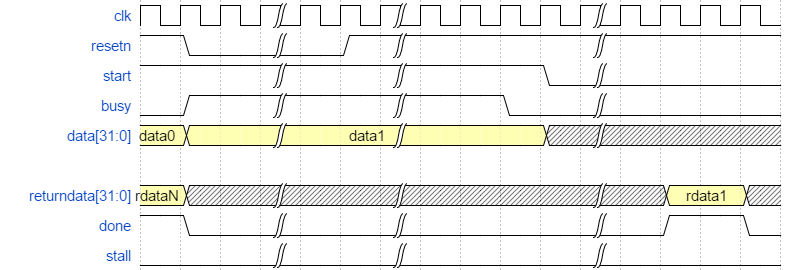
When the reset is asserted, the component holds its busy signal high and its done signal low. After the reset is deasserted, the component holds its busy signal high until the component is ready to accept the next invocation. All component interfaces (slaves, masters, and streams) are valid only after the component busy signal is low.
Simulation Component Reset
You can check the reset behavior of your component during simulation by using the ihc_hls_sim_reset API. This API returns 1 if the reset was exercised (that is, if the reset is called during hardware simulation of the component). Otherwise, the API returns 0.
int ihc_hls_sim_reset(void);During x86 emulation of your component, the ihc_hls_sim_reset API always returns 0. You cannot reset a component during x86 emulation.