Tandem Motion-Power 48 V Board Jumper Settings
| Jumper | Axis | Function |
|---|---|---|
| J6 | DRV0 | EnDAT operation |
| J7 | DRV0 | EnDAT operation |
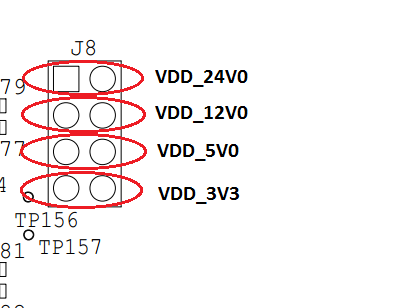
| J8 | DRV0 | Encoder power supply selection |
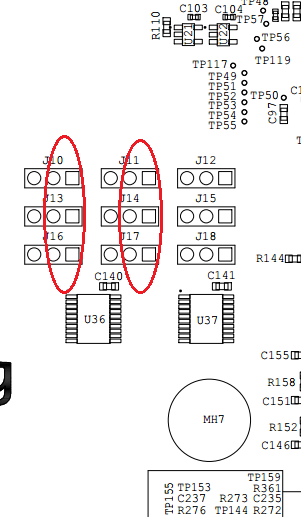
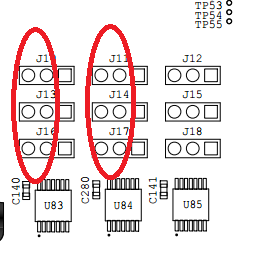
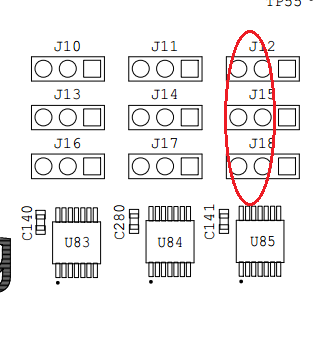
| J10 | DRV0 | Quadrature encoder A source |
| J11 | DRV0 | Hall sensor U source |
| J12 | DRV0 | Serial encoder Rx source |
| J13 | DRV0 | Quadrature encoder B source |
| J14 | DRV0 | Hall sensor V source |
| J15 | DRV0 | Serial encoder Tx source |
| J16 | DRV0 | Quadrature encoder Z source |
| J17 | DRV0 | Hall sensor W source |
| J18 | DRV0 | Serial encoder CLK source |
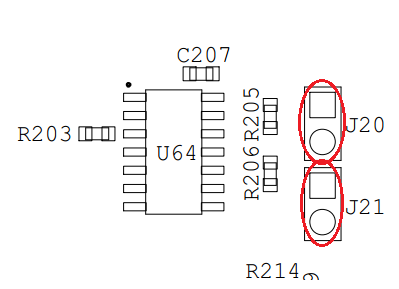
| J20 | DRV1 | EnDAT operation |
| J21 | DRV1 | EnDAT operation |
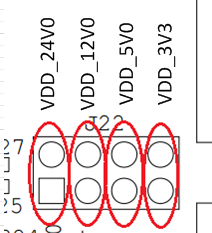
| J22 | DRV1 | Encoder power supply selection |
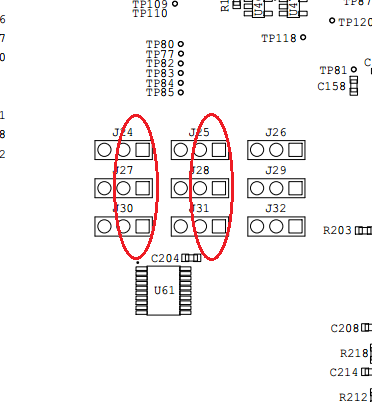
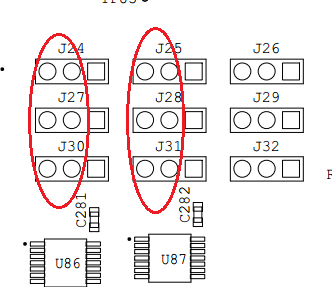
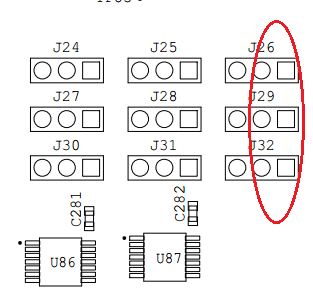
| J24 | DRV1 | Quadrature encoder A source |
| J25 | DRV1 | Hall sensor U source |
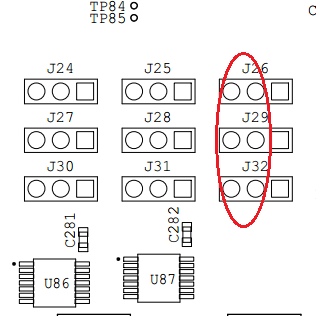
| J26 | DRV1 | Serial encoder Rx source |
| J27 | DRV1 | Quadrature encoder B source |
| J28 | DRV1 | Hall sensor V source |
| J29 | DRV1 | Serial encoder Tx source |
| J30 | DRV1 | Quadrature encoder Z source |
| J31 | DRV1 | Hall sensor W source |
| J32 | DRV1 | Serial encoder CLK source |
| J39 | DRV0 | RDC BIST |
| J40 | DRV0 | Resolver excitation voltage |
| J42 | DRV1 | RDC BIST |
| J43 | DRV1 | Resolver excitation voltage |
Quadrature Encoder and Hall Sensor Operation
You can select quadrature encoder and Hall sensor motor feedback operation by populating these six jumpers, per axis. You can set up the Tamagawa RDC to emulate a quadrature encoder.
J10, J13 and J16 select the A, B and Z quadrature paths for DRV0 motor.
J11, J14 and J17 select the U, V and W Hall sensor paths for DRV0 motor.
J24, J27 and J30 select the A, B and Z quadrature path for DRV1 motor.
J25, J28 and J31 select the U, V and W Hall sensor path for DRV1 motor.
RDC Quadrature Encoder Emulation Operation
You can setup the Tamagawa RDC to emulate a quadrature encoder and or Hall sensor encoder.
J10, J13 and J16 select the A, B and Z paths for DRV0 Resolver.
J11, J14 and J17 select the U, V and W paths for DRV0 Resolver.
J24, J27 and J30 select the A, B and Z paths for DRV1 Resolver.
J25, J28 and J31 select the U, V and W paths for DRV1 Resolver.
BiSS and EnDAT Operation
You can select BiSS or EnDAT position feedback data coming from the motor.
J12, J15 and J18 select the RX, TX and CLK paths for the DRV0 motor.

J26, J29 and J32 select the RX, TX and CLK paths for the DRV1 motor.
J6 and J7 select EnDAT for DRV0.
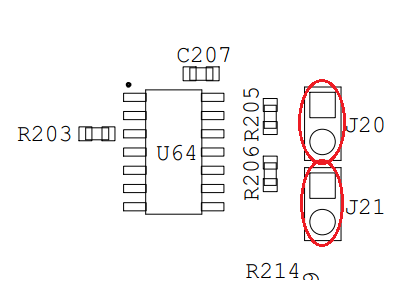
J20 and J21 select EnDAT for DRV1.
RDC Serial Feedback Operation
The Tamagawa RDC can be set up to provide serial feedback data.
J12, J15 and J18 select the RX, TX and CLK paths for the DRV0 Resolver serial data.
J26, J29 and J32 select the RX, TX and CLK paths for the DRV1 Resolver serial data.
Encoder Power Supply Selection
You can select the power supply voltage connected for the encoder interface. The available options are 24V, 12V, 5V and 3.3V.
J8 selects the voltage for encoders on DRV0.
J22 selects the voltage for encoders on DRV1.
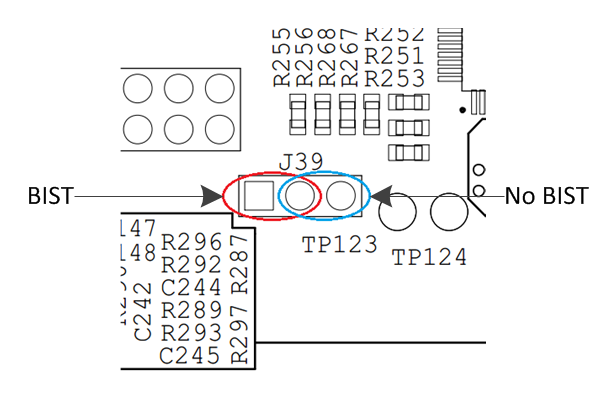
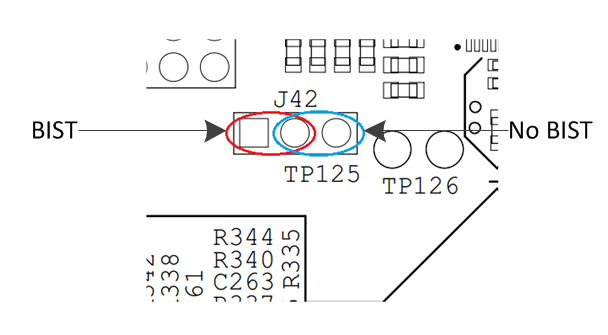
Tamagawa RDC Built-In Self Test (BIST)
The Tamagawa RDC has a BIST feature that you can access.
the population of the no BIST position is not required as the board has an internal pull-down resistor in the RDC to disable BIST.
Intel reference designs do not support the RDC BIST feature.
J39 Selects BIST operation for DRV0 RDC. (DRV0) and J42 (DRV1).
J42 Selects BIST operation for DRV1 RDC.
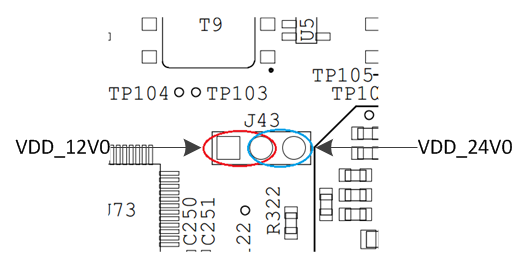
Resolver Excitation Voltage Selection
You can select the resolver circuitry excitation voltage to be either 12V or 24V.
J40 selects the excitation voltage for DRV0.
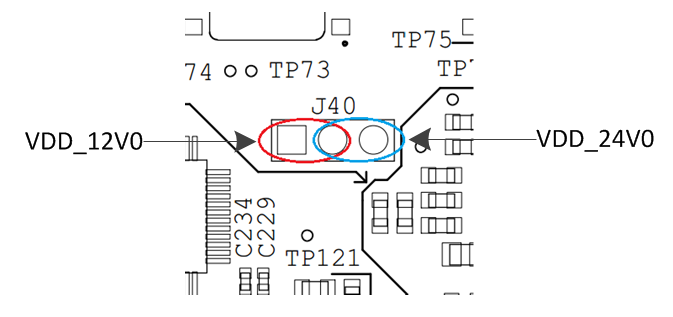
J43 selects the excitation voltage for DRV1.
I/O Voltage Supply
R378, R377, R376