It’s been an exciting week for Team Crop Dusters. We continued adding improvements to the simulator to provide better user accessibility, built our first prototype mobile setup and took it on a road trip to get some feedback from actual sprayer operators.
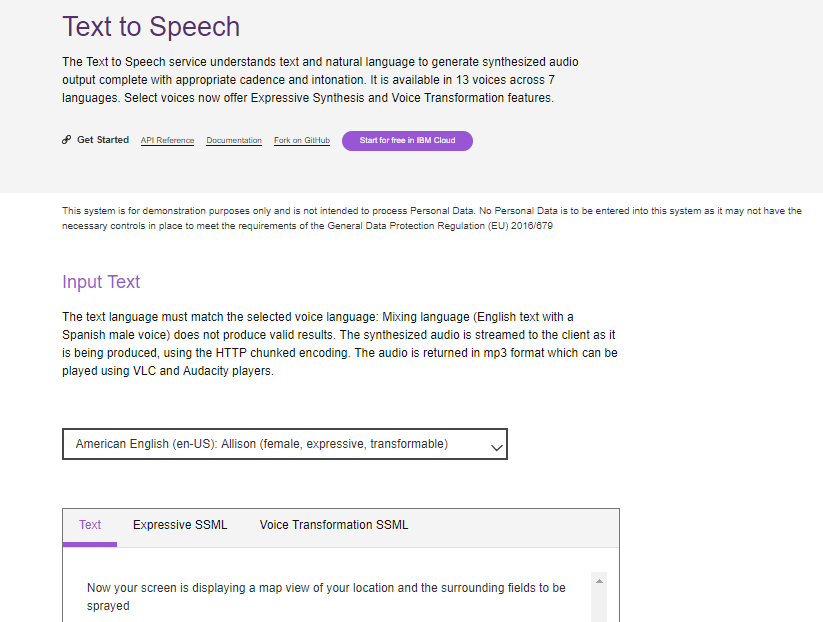
Since we had an opportunity to showcase the current state of the project to actual operators, we had to continue to enhance our experience and make it as accessible as possible. For the tutorial, we utilized a text to speech program to quickly generate voiceover narration for the operator to listen to while being walked through the steps.
Another way we added user accessibility was through highlighting objects, which was shown in last week’s video. We wanted to be able to draw the users’ attention to button and objects they need to interact with. We did this is by changing the shader on the renderer of an object. The default Unity shader has a parameter called “emission”, which allows for materials to emit a colored light. We can access the parameter like this:
highlight.GetComponent<Renderer>().material.EnableKeyword("_EMISSION");Having highlighted objects helped to focus the user on what buttons they need to press to operate the machinery. We also included a navigation system to help guide the user along the path so they spray the correct field during the tutorial. The in-cabin display in the sprayer also shows which area has been sprayed.
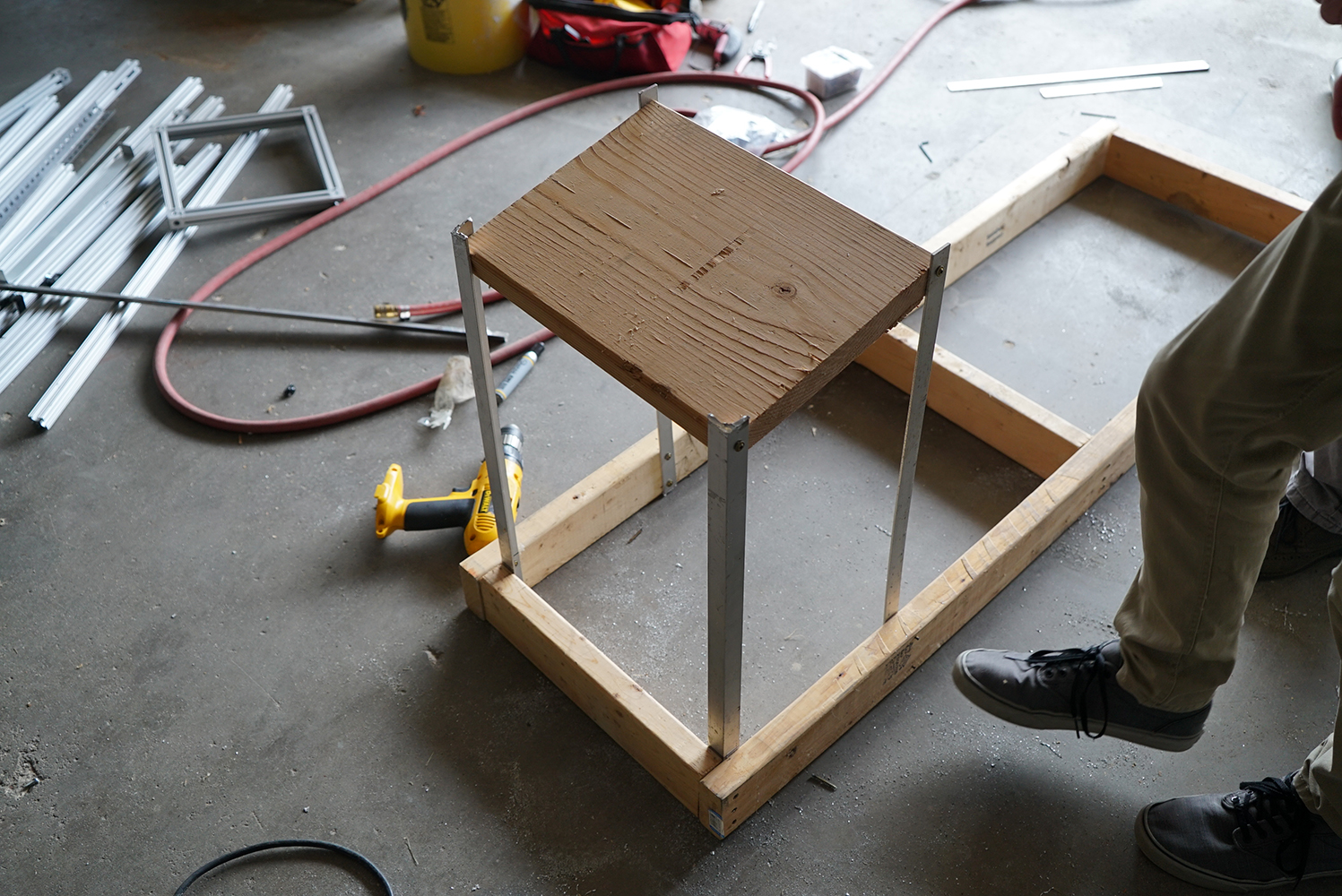
Since we knew we had an opportunity to get some early feedback on the project, we quickly put together a test rig for our simulator. Using the measurements we gathered during our first trip to see the sprayers in person, we cut some scrap wood together to make a basic frame that houses the seat, steering wheel and joystick. We then attached a couple of caster wheels and a handle to help with transportation, and gave it a quick coat of paint to make it look a little better. Of course, the current build of the rig isn’t the final design, but we needed something in place to be able to begin getting user feedback. Ultimately, the rig will have a metal frame, and will house actual equipment found in the sprayer cabin.
Unfortunately, before we were scheduled to demo our prototype, we hit a bug with the Windows MR build of the project. The joystick and steering wheel would not be detected at the same time on build out when the headset was in VR mode. Due to time constraints, we switched to demo on the Oculus Rift, which meant we had to change our setup for how we demoed the simulator.

After quite a bit of work getting our first prototype together, we packed it all up and took a road trip out to Oran, Iowa to test our simulator at Innovative Ag Services. This gave us the opportunity to demo to a variety of different experience levels, which is very helpful when trying to make a simulator that caters to a wide range of skillsets. The feedback we got for the operators was very valuable. Overall, they were very impressed with the VR program, but clued us in to some key things to improve the simulator.

One area we need to improve on is in the visualization of the farm. We need to better visualize our fields and row crops so that operators have a better visual indicator that they are driving between rows. Currently we are using low poly corn models placed on a grid, which doesn’t provide the density and placement we need. A future iteration will need to implement a new way to visualize our crops and fields so that it’s easier for the user to identify. The experts also shared with us the most important hazards to have in our environment, and how we should train the users on proper spraying techniques.

Check out the video below for even more updates from Team Crop Dusters on Week 5 of the Ultimate Coder Challenge.
https://www.youtube.com/watch?v=7qh0OC-eIJU