Intel® System Studio for Microcontrollers includes multiple samples to help you get up to speed with its basic functionality and become familiar with the Intel® Quark™ Microcontroller Software Interface (Intel® QMSI). This sample application reads and outputs accelerometer data to the serial port, and also uses the Intel® Integrated Performance Primitives for Microcontrollers (DSP functions) library to compute root mean square, variance, and mean for the last 15 Z axis readings.
Requirements
- Ensure you have completed the Getting Started instructions which you can find here: Intel® Quark™ Microcontroller D2000 Documentation
- Intel® Quark™ Microcontroller D2000 developer board and USB cable
- Intel ® System Studio for Microcontrollers
- FTDI cable (model TTL-232R-3V3 works well) for serial output. You can purchase an FTDI cable or find out more about them here: FTDI Chip. Links at the top of that page let you download drivers for the FTDI cable, if needed.
Instructions
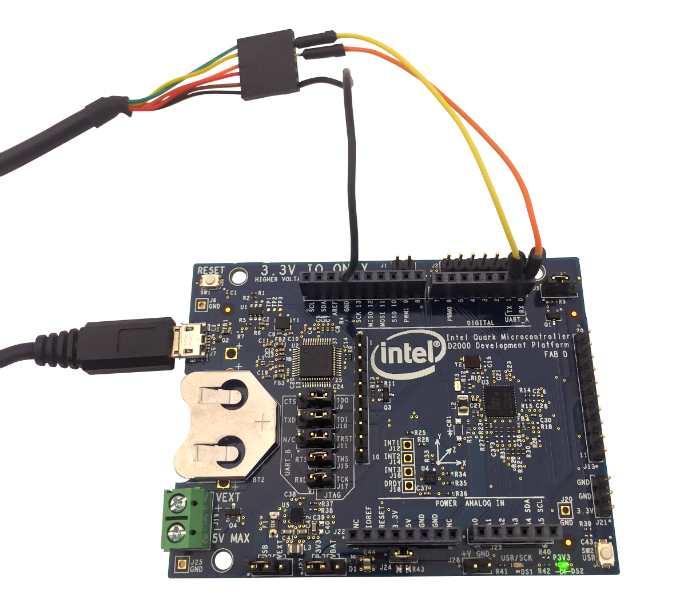
- Connect the FTDI cable for serial output by connecting the cables in the following configuration:
- Connect GND (black) from the serial cable to the board's GND pin.
- Connect TXD (orange) from the serial cable to the board's RX pin.
- Connect RXD (yellow) from the serial cable to the board's TX pin.
- Launch the Intel ® System Studio for Microcontrollers IDE.
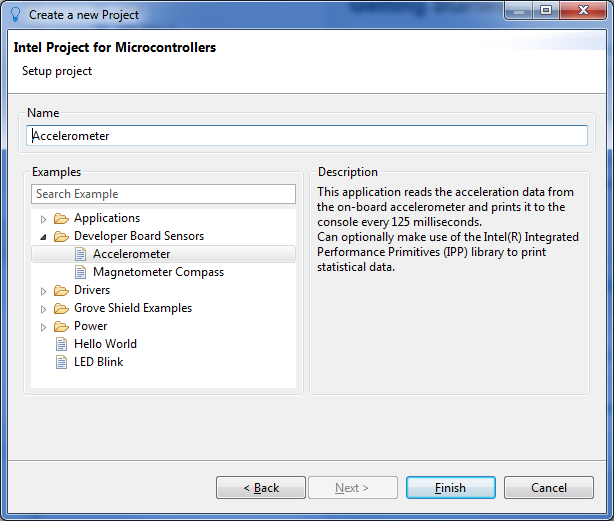
- Create a project with the "Accelerometer" sample project file, as follows:
- From the File menu, select New, and then select Intel Project for Microcontrollers. The Create a new Project wizard appears.
- Specify the following values in the Create a new Project wizard:
- Developer board: Intel® Quark™ D2000 Developer Board
- Project type: Intel® QMSI (1.1)
- Connection type: USB-Onboard
- Project name: Accelerometer
- Click Finish.
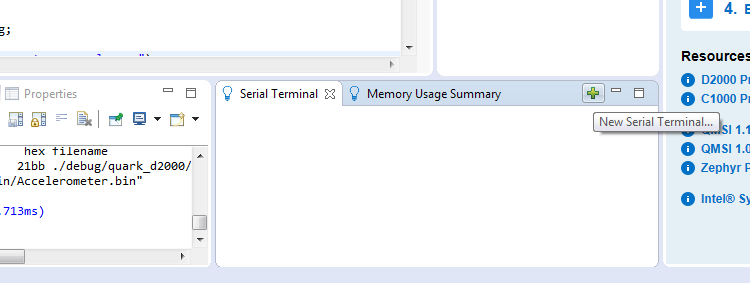
- Set up the Serial Terminal view to see the sensor output. This window will display the accelerometer's sensor data via the UART interface over the serial cable.
Tip: The port will vary depending on the serial hardware used, and there may be more than one listed. There are a few ways to check your port:Note: If you close the Serial Terminal window, you can open it again by choosing Window > Show View > Other > Intel ISSM > Serial Terminal
- At the bottom right of the window, select the Serial Terminal tab, and click the
 icon to open a new serial terminal connection.
icon to open a new serial terminal connection.
- Ensure that the correct serial port is selected. You can also click the Custom configuration menu to modify the default serial connection settings.
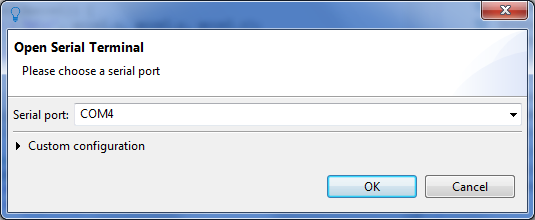
- Unplug the FTDI cable from your PC and refresh the “Open Serial Terminal” window to determine which COM port is active.
- Linux*: Use the ‘dmesg’ command to view your port status.
- Windows*: Open Device Manager to view the Ports (COM & LPT) status.
- Click OK and the connection to the Serial Terminal will be made. You should see status “Connected” in the serial console.
- At the bottom right of the window, select the Serial Terminal tab, and click the
- Build and deploy your project.
Note: you can also deploy and debug. From the Debug
 drop-down list, select "Accelerometer (flashing)".
drop-down list, select "Accelerometer (flashing)".- Select the "Accelerometer" project in the Project Explorer.
- Click the Build
 button to compile your project.
button to compile your project. - From the Run
 drop-down list, select "Accelerometer (flashing)".
drop-down list, select "Accelerometer (flashing)". - View X, Y, and Z values from the accelerometer in the terminal.
How It Works
The accelerometer sample uses the onboard Bosch BMC150 accelerometer connected to the microcontroller using the I2C interface, and the RTC (real time clock) integrated in Intel® Quark™ microcontroller. It also uses the integrated UART module for the data output over serial port.
The sample begins in the main function, with setting up RTC parameters in an rtc configuration structure:
/* Configure the RTC and request the IRQ. */
rtc.init_val = 0;
rtc.alarm_en = true;
rtc.alarm_val = INTERVAL;
rtc.callback = accel_callback;
rtc.callback_data = NULL;
This configuration enables the RTC alarm, and sets accel_callback as the callback function for the RTC alarm. It is used to periodically print accelerometer data.
Next, the code requests an interrupt for the RTC by using a QMSI API call, and also enables the RTC clock:
qm_irq_request(QM_IRQ_RTC_0, qm_rtc_isr_0);
/* Enable the RTC. */
clk_periph_enable(CLK_PERIPH_RTC_REGISTER | CLK_PERIPH_CLK);
After that, it configures the accelerometer parameters depending on the accelerometer type (BMC150 or BMI160):
#if (QUARK_D2000)
cfg.pos = BMC150_J14_POS_0;
#endif /* QUARK_D2000 */
/* Initialise the sensor config and set the mode. */
bmx1xx_init(cfg);
bmx1xx_accel_set_mode(BMX1XX_MODE_2G);
#if (BMC150_SENSOR)
bmx1xx_set_bandwidth(BMC150_BANDWIDTH_64MS); /* Set the bandwidth. */
#elif(BMI160_SENSOR)
bmx1xx_set_bandwidth(BMI160_BANDWIDTH_10MS); /* Set the bandwidth. */
#endif /* BMC150_SENSOR */
The cfs.pos parameter is used to configure the accelerometer address for the BMC150 accelerometer. The Intel® Quark™ Microcontroller D2000 Developer Kit board has a jumper that allows changing the address. The BMC150_J14_POS_0 is the default (no jumper, I2C address 0x10) configuration.
Next, the RTC configuration is set up, thus enabling the RTC alarm:
/* Start the RTC. */
qm_rtc_set_config(QM_RTC_0, &rtc);
A while loop is used to wait for the defined number of samples from the accelerometer to be read and printed to the serial console output:
/* Wait for the correct number of samples to be read. */
while (!complete)
;
Each time the 125-millisecond interval is reached and the RTC alarm is triggered, the following accel_callback function is invoked. The accel data structure defined at the start of the function is passed into the bmx1xx_read_accel function, which populates it with the current accelerometer data read. If this read is successful, the accelerometer data is printed to the serial console output; otherwise, an error message is printed.
/* Accel callback will run every time the RTC alarm triggers. */
static void accel_callback(void *data)
{
bmx1xx_accel_t accel = {0};
if (0 == bmx1xx_read_accel(&accel)) {
QM_PRINTF("x %d y %d z %d\n", accel.x, accel.y, accel.z);
} else {
QM_PUTS("Error: unable to read from sensor");
}
If IPP is enabled (it is enabled by default in the sample application), it prints the statistics for the Z axis by calling the print_axis_stats function. (See the print_axis_stats function description, below.)
#if (__IPP_ENABLED__)
print_axis_stats(accel.z);
#endif /* __IPP_ENABLE__ */
The callback function checks whether the defined number of samples have been read; if not, the RTC alarm is reset and the count is incremented, otherwise the complete variable is set to true.
/* Reset the RTC alarm to fire again if necessary. */
if (cb_count < NUM_SAMPLES) {
qm_rtc_set_alarm(QM_RTC_0,
(QM_RTC[QM_RTC_0].rtc_ccvr + INTERVAL));
cb_count++;
} else {
complete = true;
}
Note that by default, the application reads 500 samples (NUM_SAMPLES) before exiting.
Finally, when the complete variable is set to true, the while loop exits and the applications prints a final statement to the serial console output, and exits.
QM_PUTS("Finished: Accelerometer example app");
return 0;
}
Intel® Integrated Performance Primitives for Microcontrollers Library
The Intel® Integrated Performance Primitives for Microcontrollers library is a set of building blocks for signal and data processing applications for x86-based microcontrollers. Intel® IPP is available with an Intel® IPP classic-style API and a generic DSP-style API; this application is developed with the DSP-style API to demonstrate the usage of Intel® IPP for Microcontrollers in a DSP use case. Additional information on Intel® IPP can be found in the Intel® System Studio for Microcontrollers User and Reference Guide.
The print_axis_stats function uses the Intel IPP (Intel® Integrated Performance Primitives) library to print the statistics of the last 15 (set by NUM_SAMPLES) Z axis readings.
First, it updates the samples array with the new Z axis sample, and if needed, updates the samples count:
static void print_axis_stats(int16_t value)
{
static uint32_t index = 0;
static uint32_t count = 0;
float32_t mean, var, rms;
/* Overwrite the oldest sample in the array. */
samples[index] = value;
/* Move the index on the next position, wrap around if necessary. */
index = (index + 1) % SAMPLES_SIZE;
/* Store number of samples until it reaches SAMPLES_SIZE. */
count = count == SAMPLES_SIZE ? SAMPLES_SIZE : count + 1;
Next, it calculates and prints root mean square, variance, and mean values for the collected samples, using the ippsq statistics functions:
/* Get the root mean square (RMS), variance and mean. */
ippsq_rms_f32(samples, count, &rms);
ippsq_var_f32(samples, count, &var);
ippsq_mean_f32(samples, count, &mean);
QM_PRINTF("rms %d var %d mean %d\n", (int)rms, (int)var, (int)mean);
}
Accelerometer Sample Application Code
/*
* Copyright (c) 2016, Intel Corporation
* All rights reserved.
*/
/*
* QMSI Accelerometer app example.
*
* This app will read the accelerometer data from the onboard BMC150/160 sensor
* and print it to the console every 125 milliseconds. The app will complete
* once it has read 500 samples.
*
* If the app is compiled with the Intel(R) Integrated Performance Primitives
* (IPP) library enabled, it will also print the Root Mean Square (RMS),
* variance and mean of the last 15 samples each time.
*/
#include
#if (__IPP_ENABLED__)
#include
#endif
#include "clk.h"
#include "qm_interrupt.h"
#include "qm_isr.h"
#include "qm_rtc.h"
#include "qm_uart.h"
#include "bmx1xx/bmx1xx.h"
#define INTERVAL (QM_RTC_ALARM_SECOND >> 3) /* 125 milliseconds. */
#define NUM_SAMPLES (500)
#if (__IPP_ENABLED__)
/* Number of samples to use to generate the statistics from. */
#define SAMPLES_SIZE (15)
#endif /* __IPP_ENABLED__ */
static volatile uint32_t cb_count = 0;
static volatile bool complete = false;
#if (__IPP_ENABLED__)
static float32_t samples[SAMPLES_SIZE];
static void print_axis_stats(int16_t value)
{
static uint32_t index = 0;
static uint32_t count = 0;
float32_t mean, var, rms;
/* Overwrite the oldest sample in the array. */
samples[index] = value;
/* Move the index on the next position, wrap around if necessary. */
index = (index + 1) % SAMPLES_SIZE;
/* Store number of samples until it reaches SAMPLES_SIZE. */
count = count == SAMPLES_SIZE ? SAMPLES_SIZE : count + 1;
/* Get the root mean square (RMS), variance and mean. */
ippsq_rms_f32(samples, count, &rms);
ippsq_var_f32(samples, count, &var);
ippsq_mean_f32(samples, count, &mean);
QM_PRINTF("rms %d var %d mean %d\n", (int)rms, (int)var, (int)mean);
}
#endif /* __IPP_ENABLE__ */
/* Accel callback will run every time the RTC alarm triggers. */
static void accel_callback(void *data)
{
bmx1xx_accel_t accel = {0};
if (0 == bmx1xx_read_accel(&accel)) {
QM_PRINTF("x %d y %d z %d\n", accel.x, accel.y, accel.z);
} else {
QM_PUTS("Error: unable to read from sensor");
}
#if (__IPP_ENABLED__)
print_axis_stats(accel.z);
#endif /* __IPP_ENABLE__ */
/* Reset the RTC alarm to fire again if necessary. */
if (cb_count < NUM_SAMPLES) {
qm_rtc_set_alarm(QM_RTC_0,
(QM_RTC[QM_RTC_0].rtc_ccvr + INTERVAL));
cb_count++;
} else {
complete = true;
}
}
int main(void)
{
qm_rtc_config_t rtc;
bmx1xx_setup_config_t cfg;
QM_PUTS("Starting: Accelerometer example app");
/* Configure the RTC and request the IRQ. */
rtc.init_val = 0;
rtc.alarm_en = true;
rtc.alarm_val = INTERVAL;
rtc.callback = accel_callback;
rtc.callback_data = NULL;
qm_irq_request(QM_IRQ_RTC_0, qm_rtc_isr_0);
/* Enable the RTC. */
clk_periph_enable(CLK_PERIPH_RTC_REGISTER | CLK_PERIPH_CLK);
#if (QUARK_D2000)
cfg.pos = BMC150_J14_POS_0;
#endif /* QUARK_D2000 */
/* Initialise the sensor config and set the mode. */
bmx1xx_init(cfg);
bmx1xx_accel_set_mode(BMX1XX_MODE_2G);
#if (BMC150_SENSOR)
bmx1xx_set_bandwidth(BMC150_BANDWIDTH_64MS); /* Set the bandwidth. */
#elif(BMI160_SENSOR)
bmx1xx_set_bandwidth(BMI160_BANDWIDTH_10MS); /* Set the bandwidth. */
#endif /* BMC150_SENSOR */
/* Start the RTC. */
qm_rtc_set_config(QM_RTC_0, &rtc);
/* Wait for the correct number of samples to be read. */
while (!complete)
;
QM_PUTS("Finished: Accelerometer example app");
return 0;
}